

目次

次が実家

フィラメント使用量をひたすら削り、壁面の層数が柱部分が2で壁部分が1になるように厚みを調整しつつ、各寸法は全部パラメータから変更できるようにこだわって作った。
Poopの方が重いまである。そこも削りたい。
📄![]() アームスタンドでMagSafe(Qi2)の空中充電ステーション(マイク付き)を作った
アームスタンドでMagSafe(Qi2)の空中充電ステーション(マイク付き)を作った
これとか
これとか
IKEA TERTIALとかアリエクの激安マイクアーム用

↓説明
↓本体

とてもとてもこだわって作った。
後発にぶち抜かれて終わった。
このあたりでRaspberry Pi PicoのPIO CANでロボマスモーターが動かせるようになった。I can CAN.
Nidec 24Hモーターのヘリカルギア軸を使った最初の作。
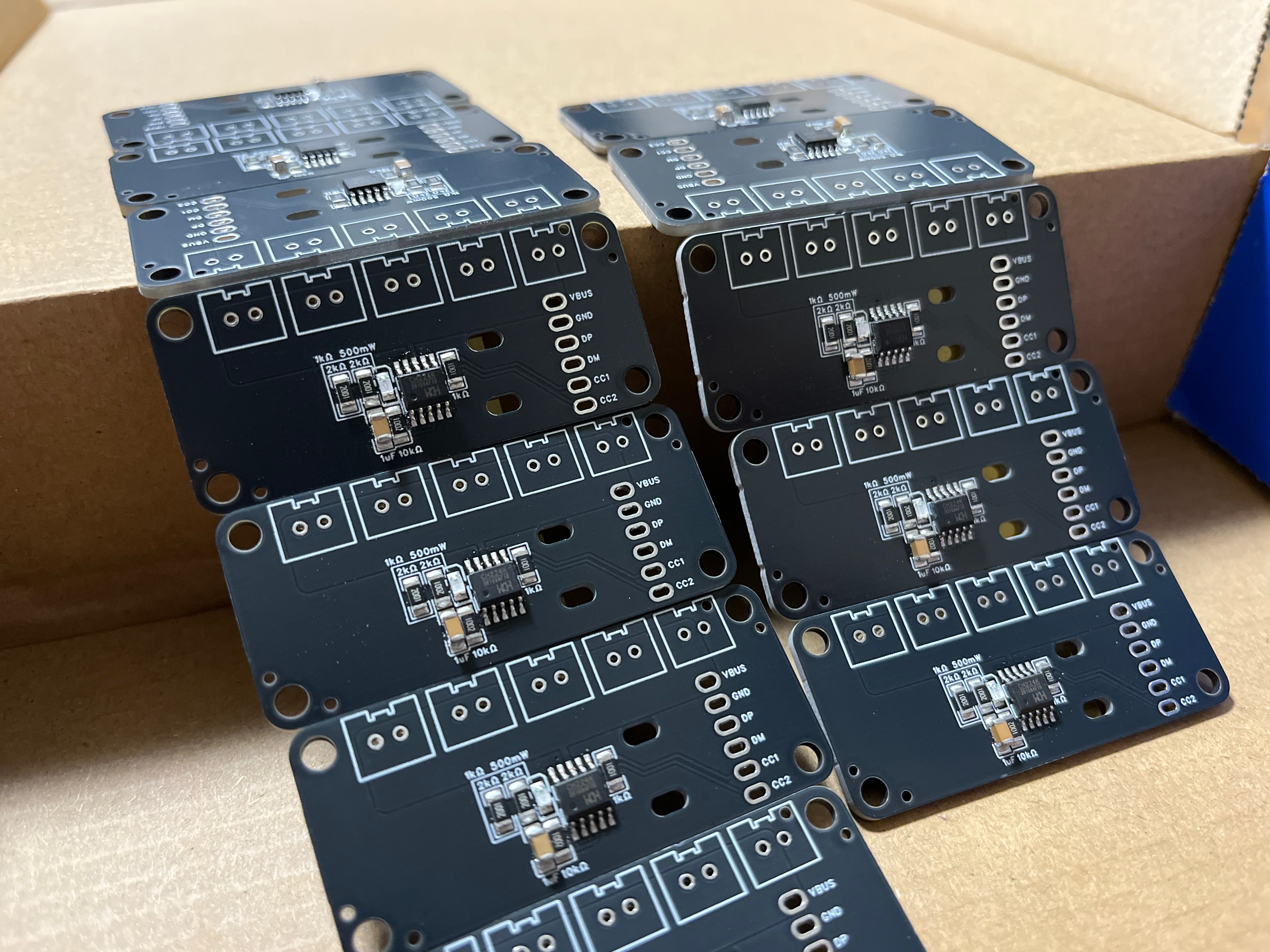
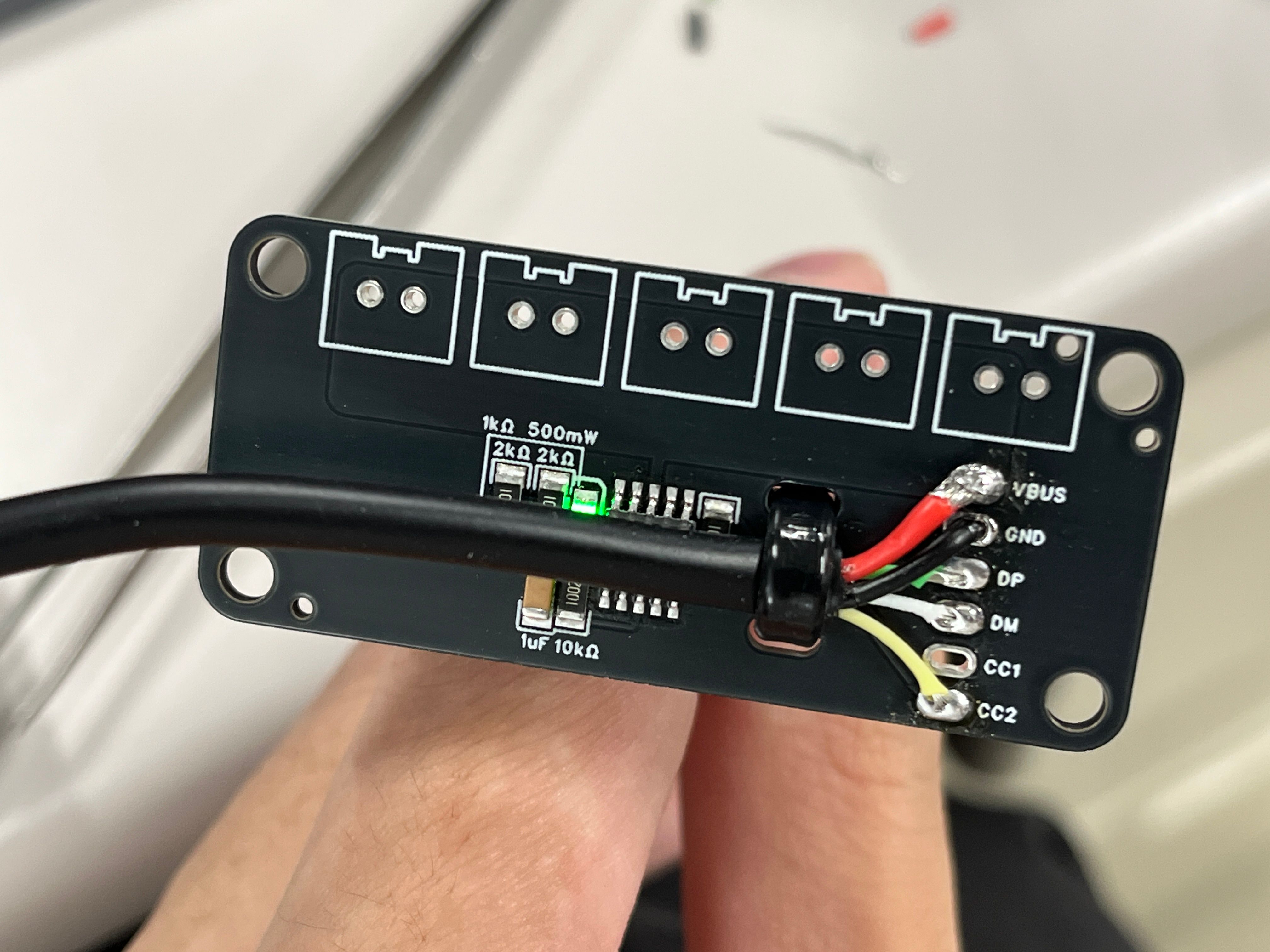
1000円に収まるように作った。

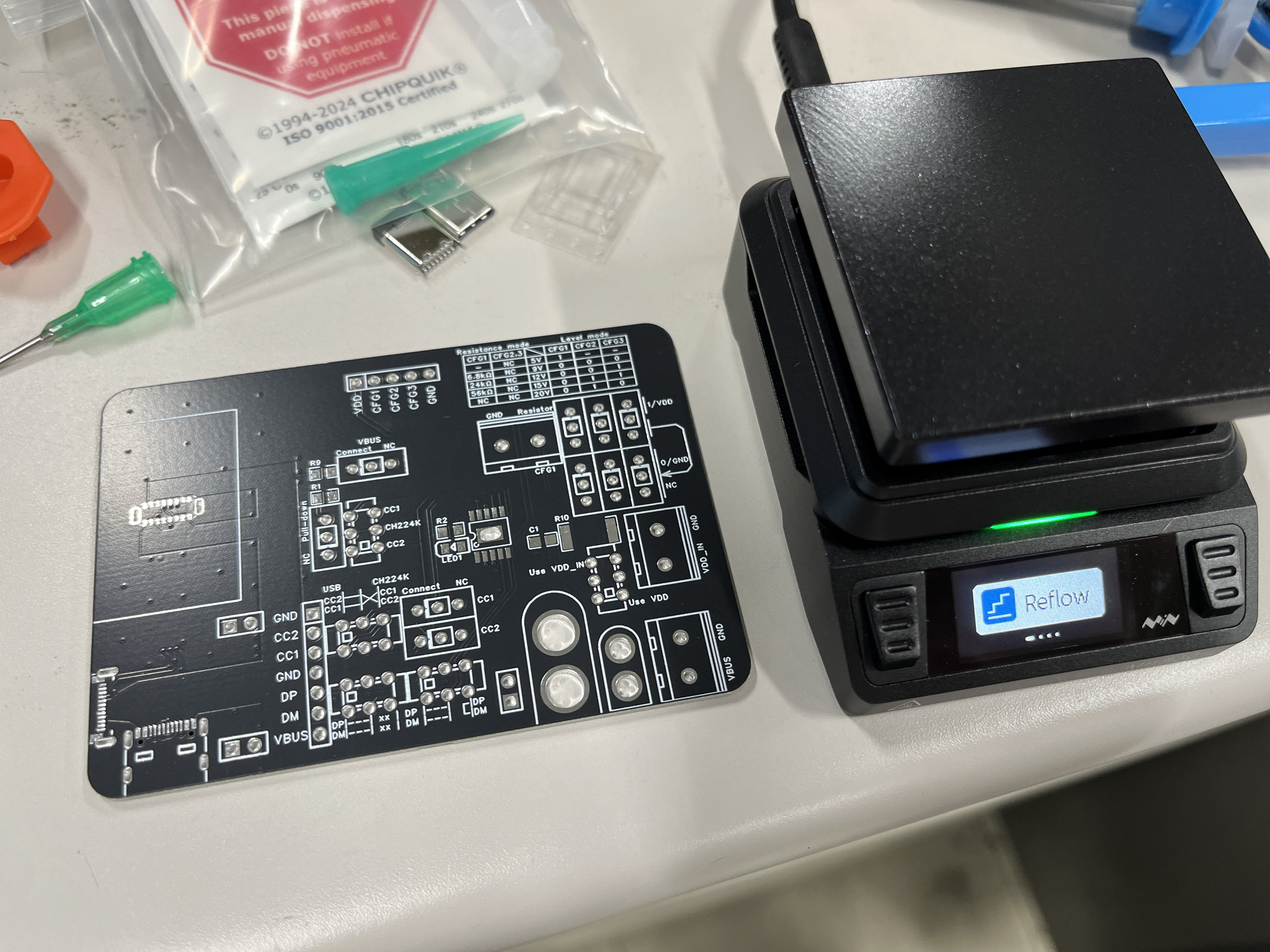
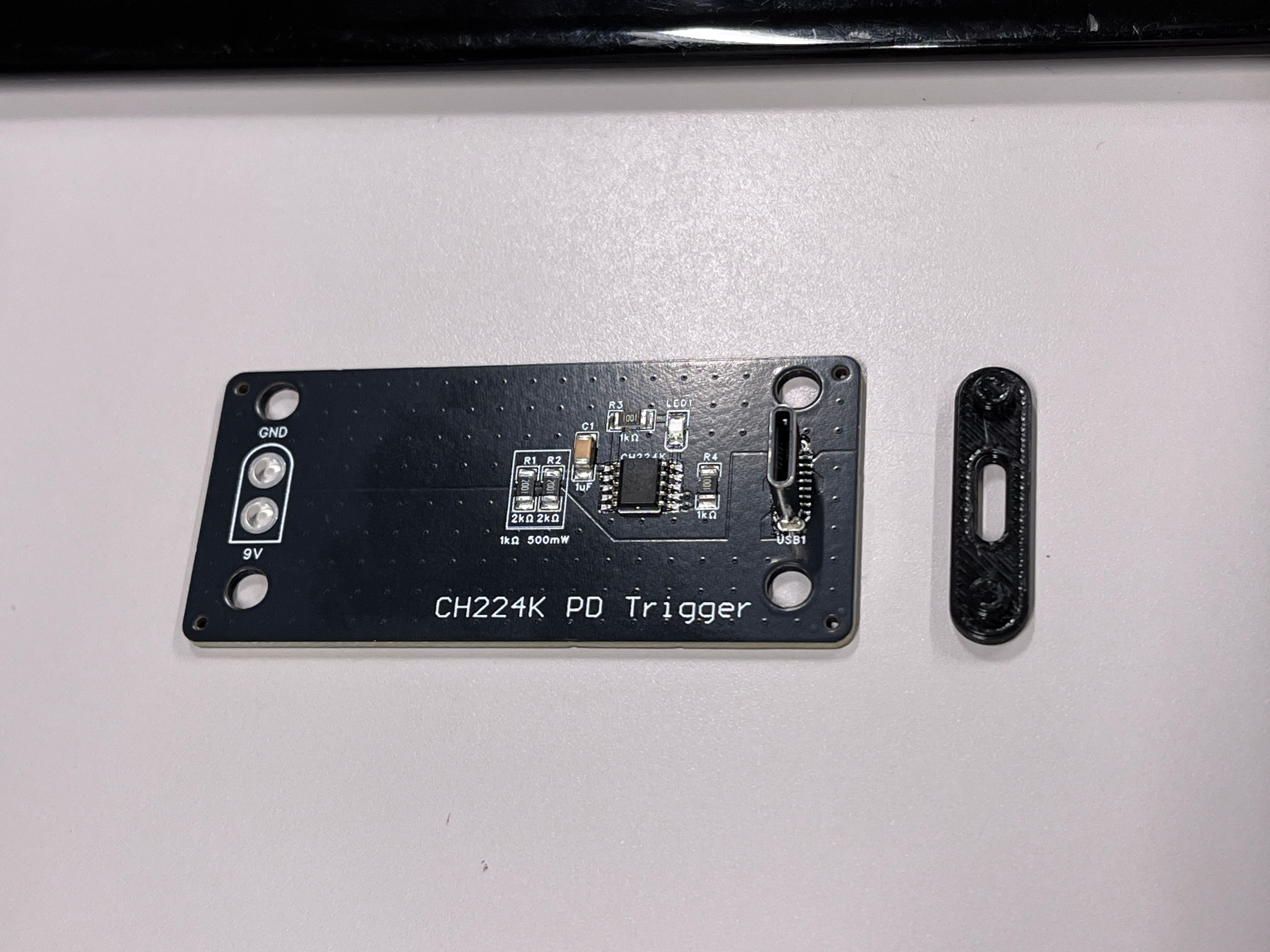
Type-Cのメス・オス・垂直のオスでDPDM入れ替えとか未接続とかショートとか、CC1,2の入れ替えとか未接続とかプルダウンとか、とりあえず2回路のスイッチを付けまくって全部試せるようにした基板。
CH224Kの仕様をかなり理解できた回。

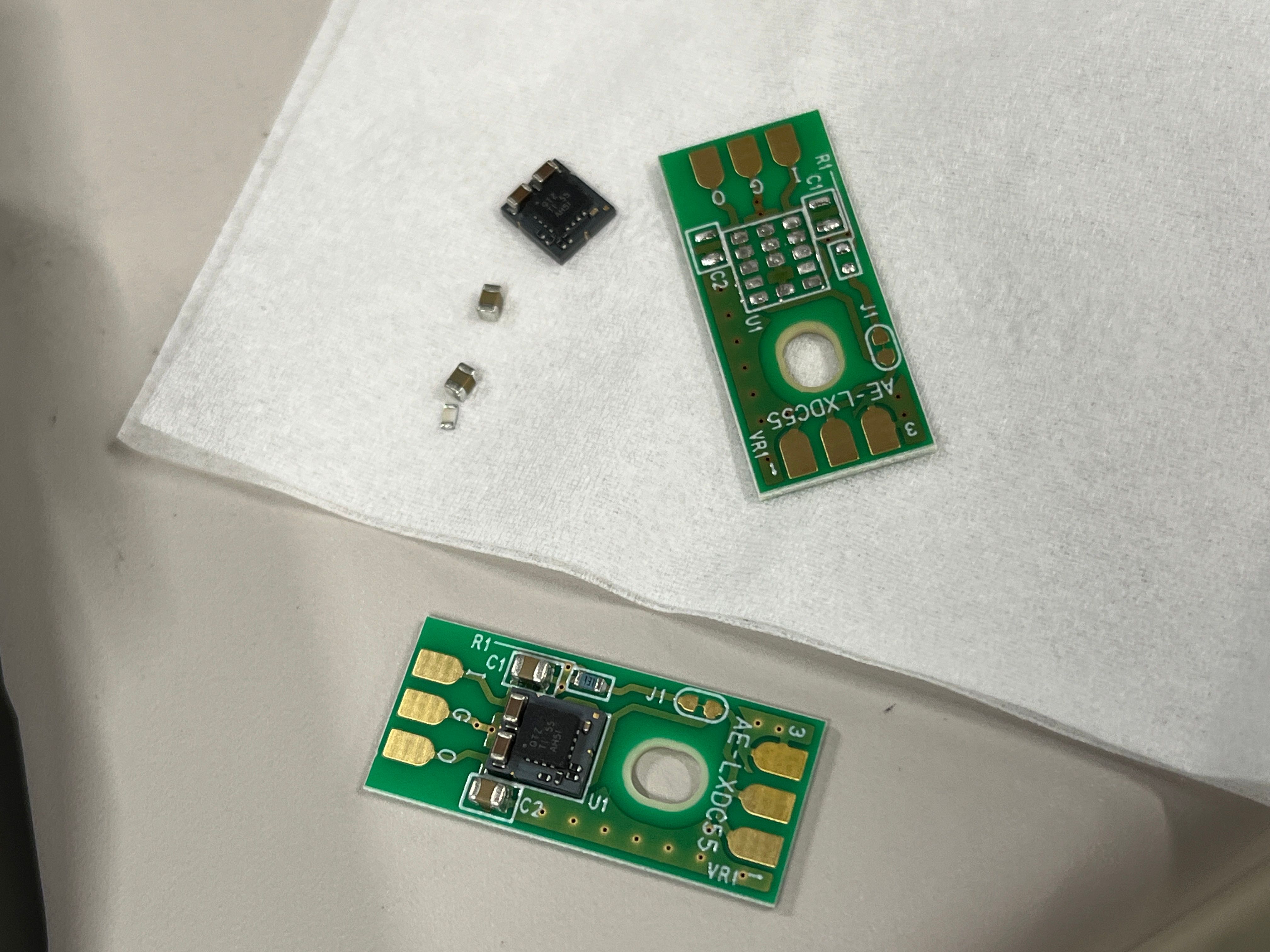
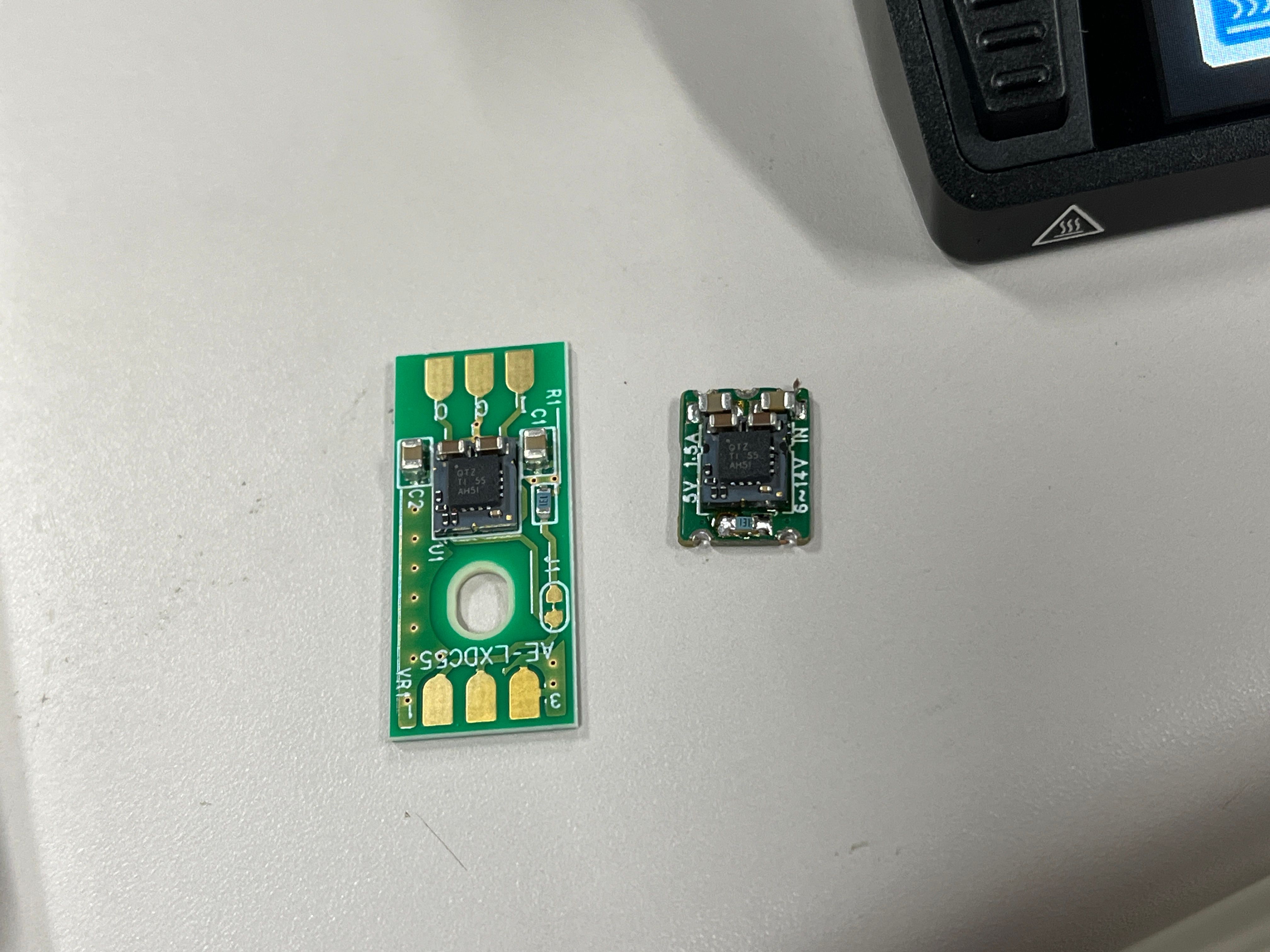
表面実装機で剥がしてそのまま載せ替えると小さくなる。
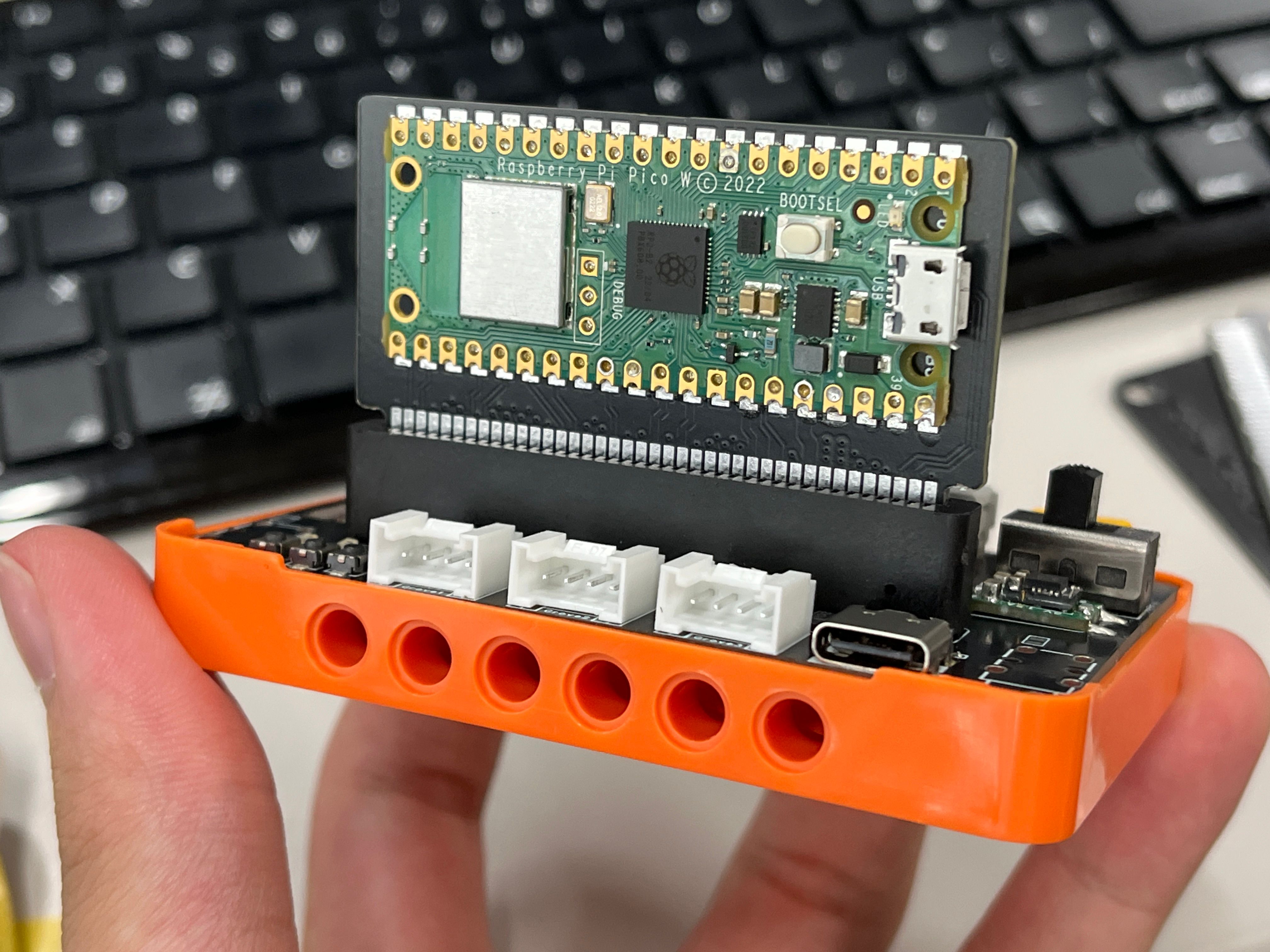
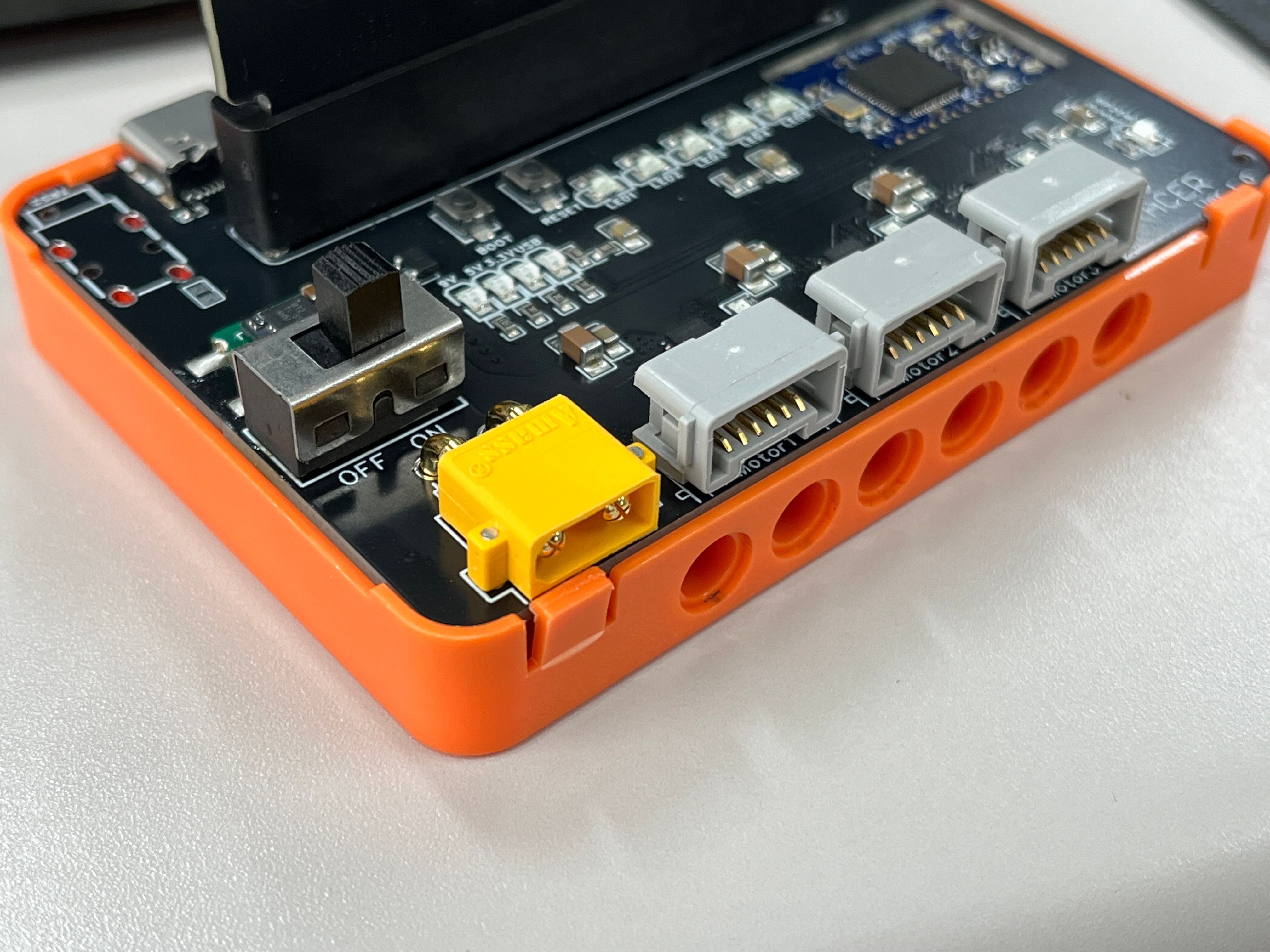
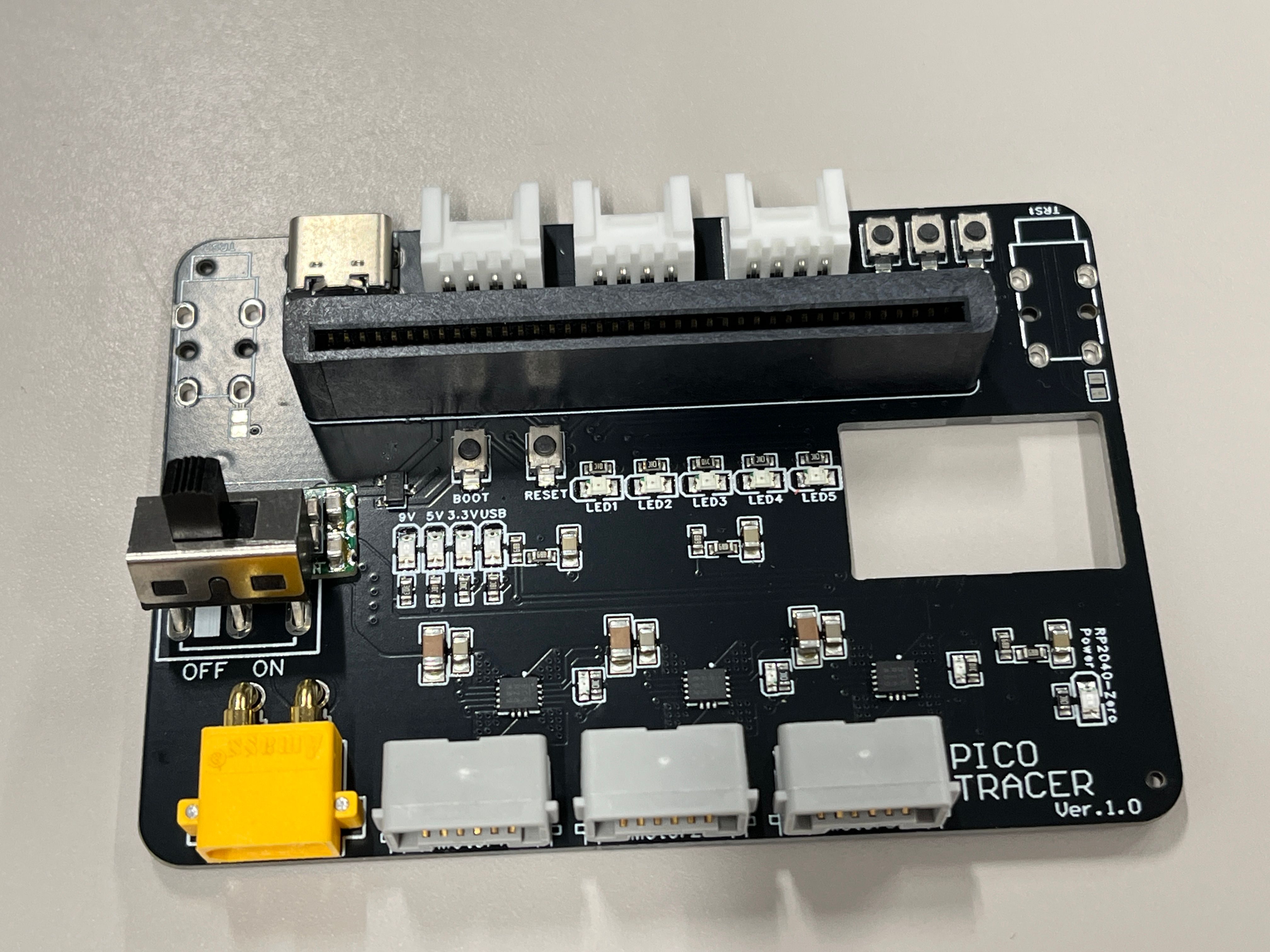
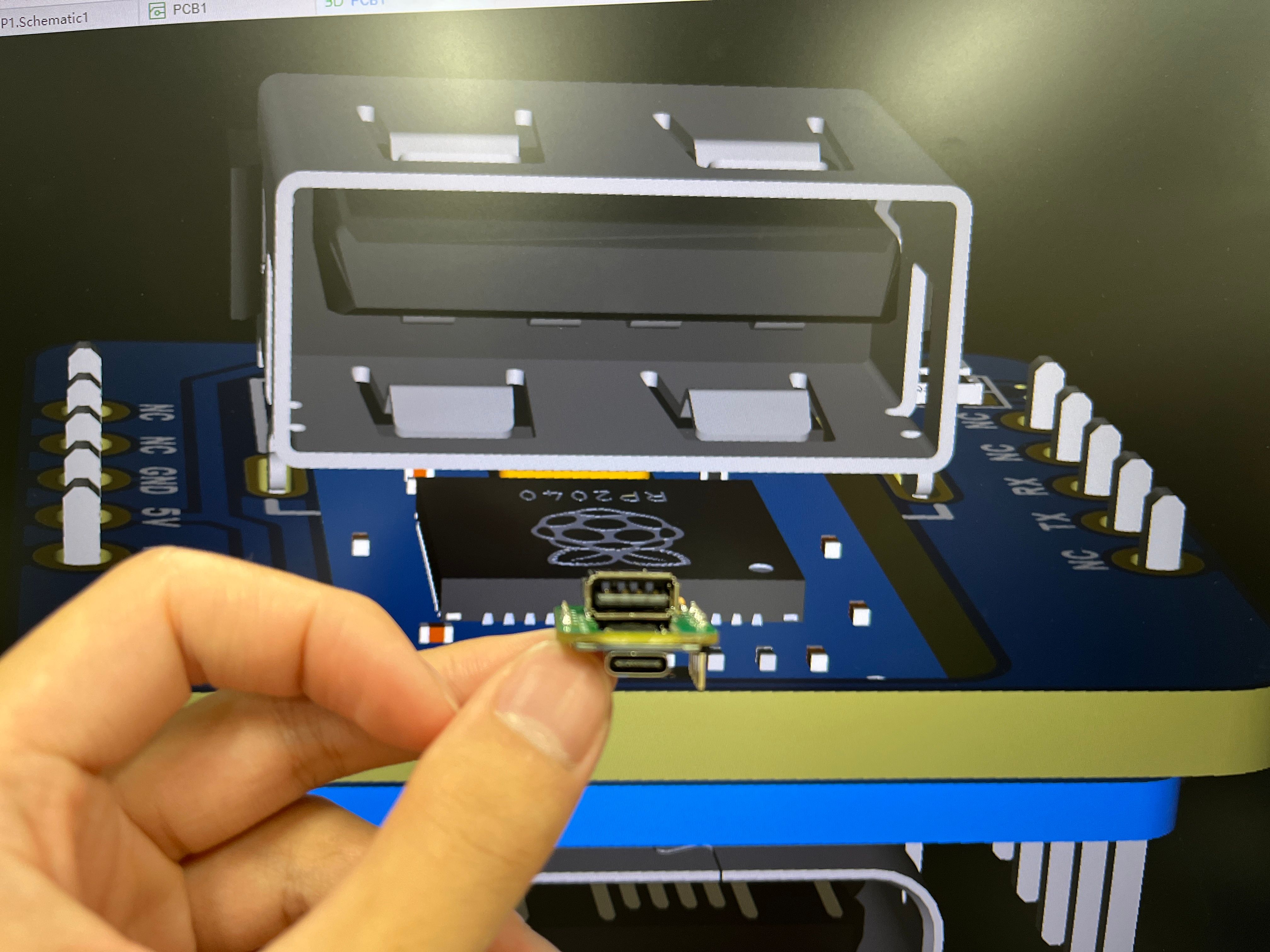
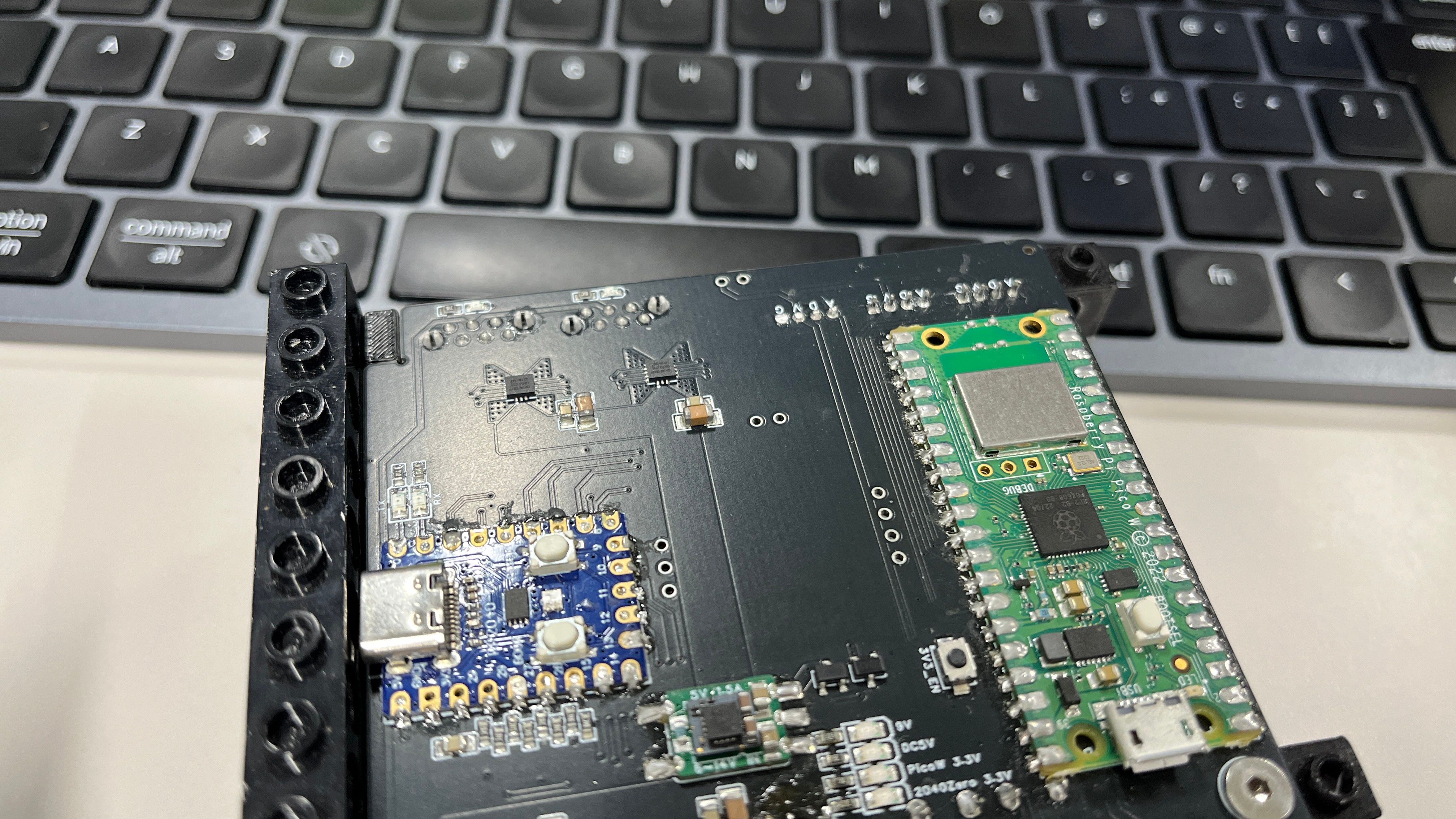
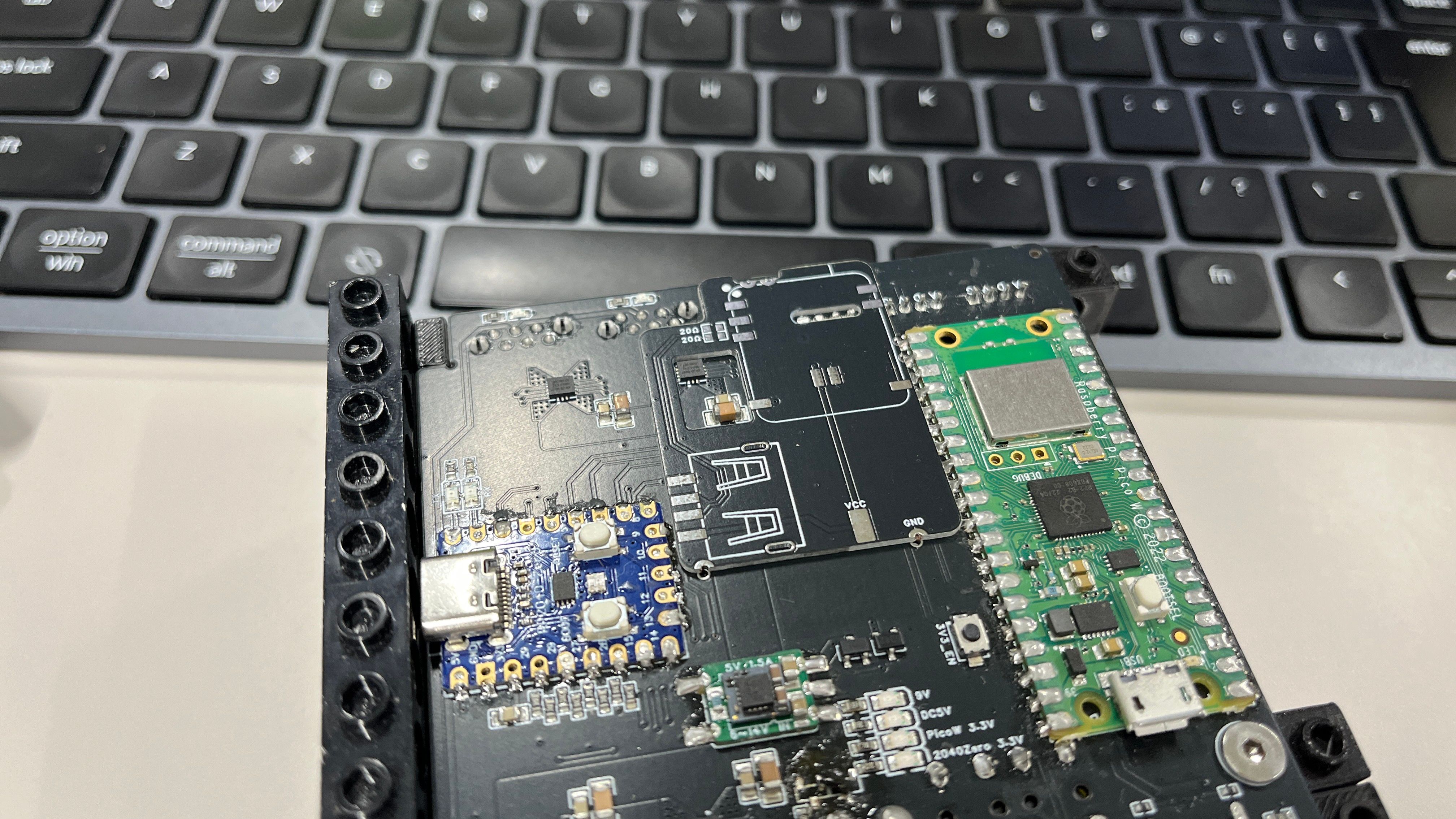
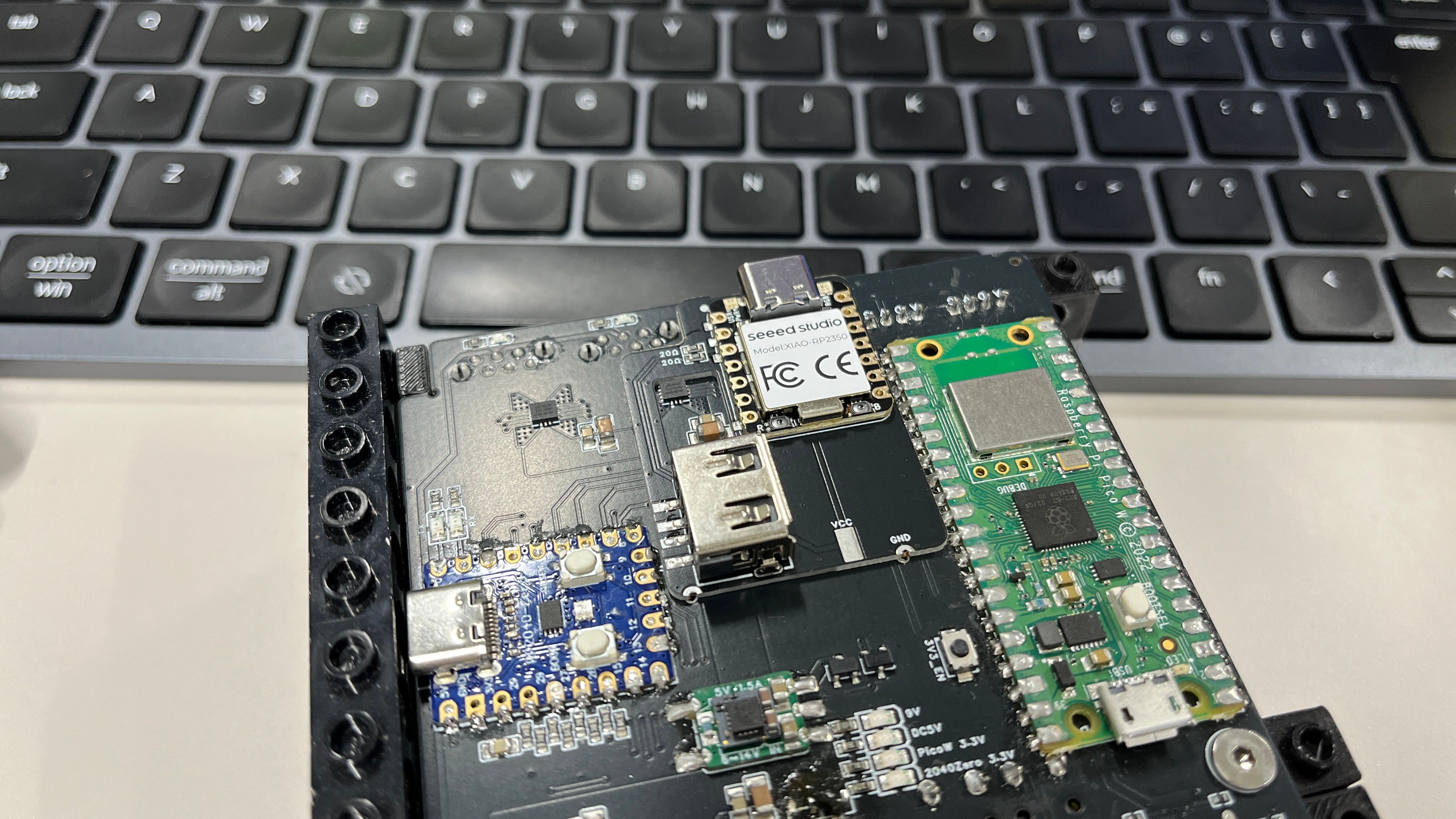
Raspberry Pi Pico Wを表面実装して、カードエッジコネクタから全ピン引き出して使う基板。
TP2, TP3も引き出して、Type-Cから書き込みができるようになってる。
Wedo2.0コネクタでLEGO互換モーターを回したり、マイクロマウスっぽいかと思ってMP6551を載せてみたり、I2Cをのピンをミスったり、3.3VのNeoPixel(YF923-2020)の手実装が非常に難しかったり、電源スイッチがデカいのに瞬殺されたりした。
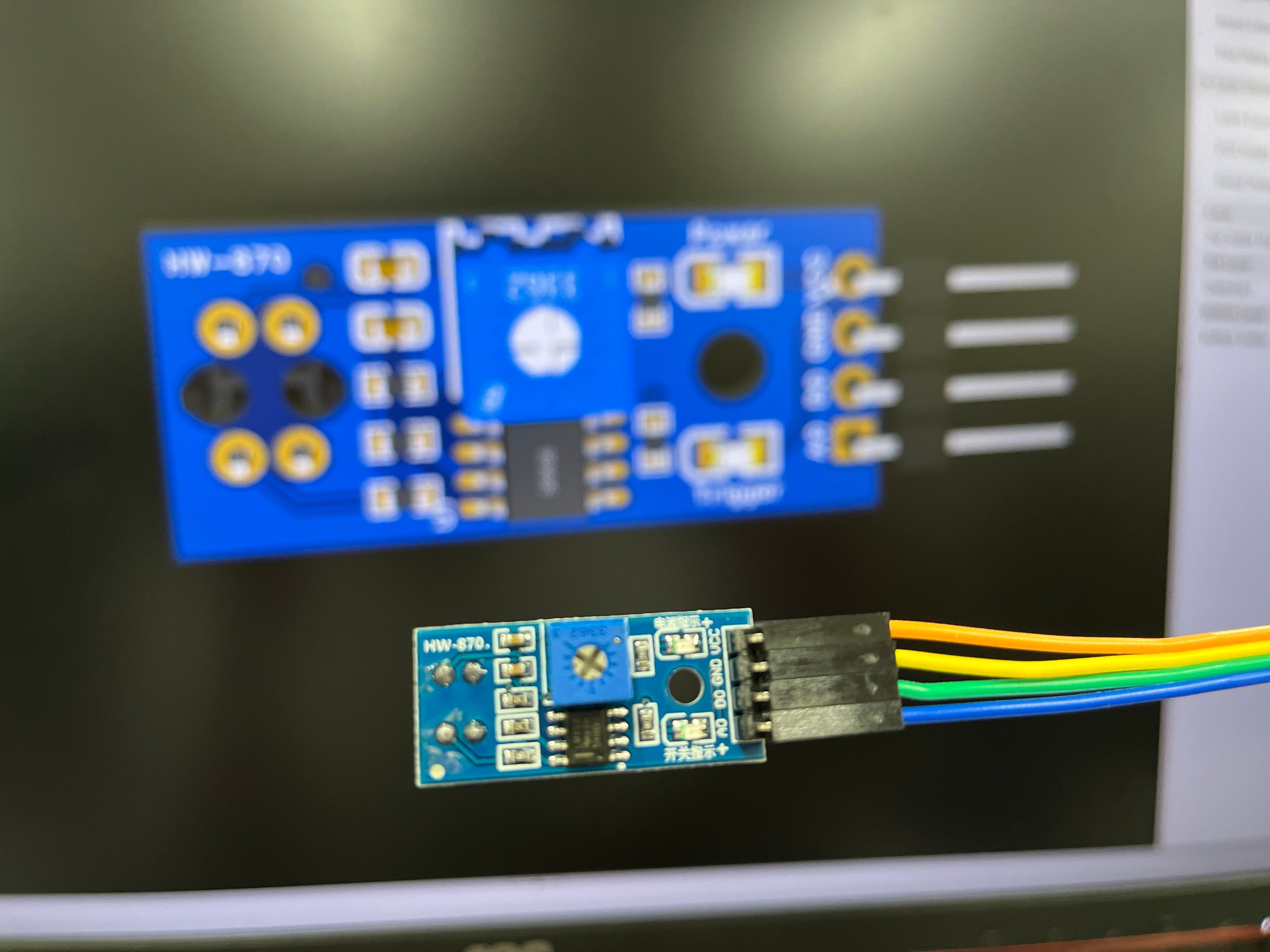



HW-870モジュールをM5互換に配置換えする基板。市販(本家)はLEDの向きが使いにくいから自作した。あとお金ケチった。

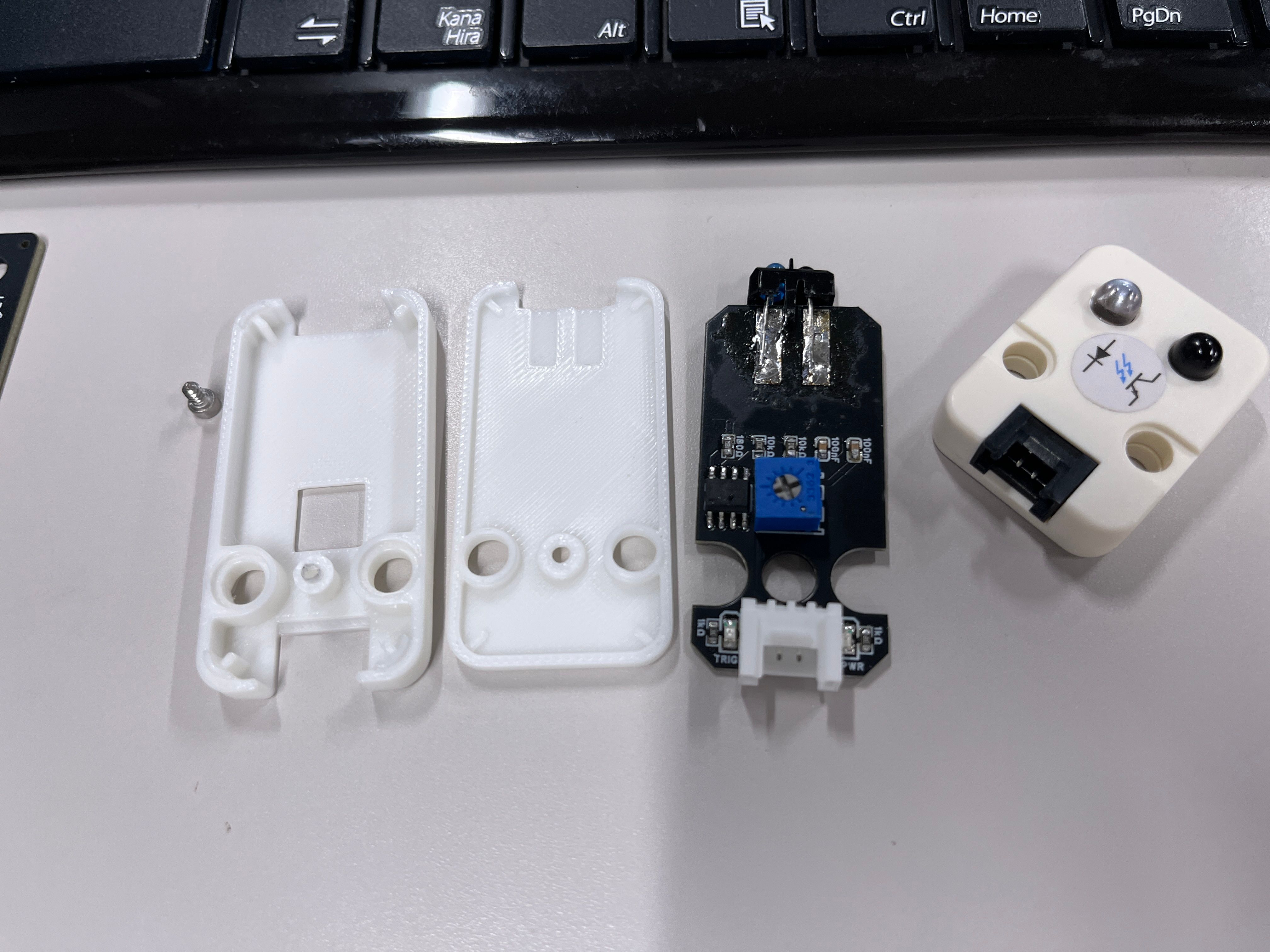


基板外形はGitHubにあったからそれを真似たけど、ケースの寸法とかそういうのは特に無かったので採寸して頑張ってケース作った。3Dプリント品とは思えないクオリティにできて満足。



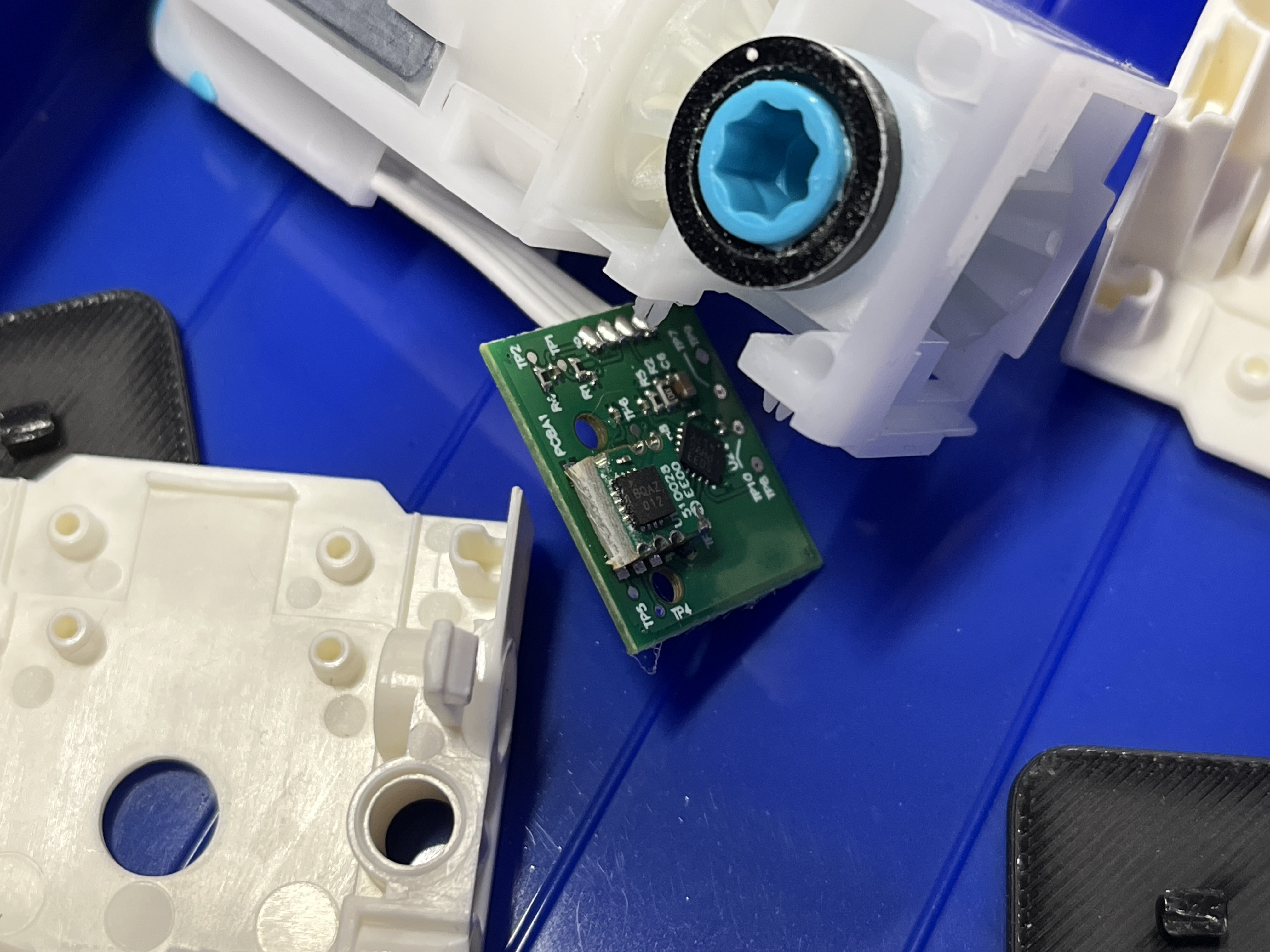
アリエクパチモンSPIKEモーターだけどちゃんとマイコンと磁気アブソが入ってて、ちゃんと厄介な儀式みたいなことしないとフィードバックが読めない仕様だった。
EV3はインクリメンタルエンコーダだけど、SPIKEはUARTで通信しないといけない。とても苦労した。
Raspberry Pi PicoでMicroPythonからPIOのソフトウェアシリアルが簡単に使えなくて泣く泣く不採用になった。
教材として使う直前がデスマすぎて写真も残ってない。
後で無線化したときに画像が出てくる。
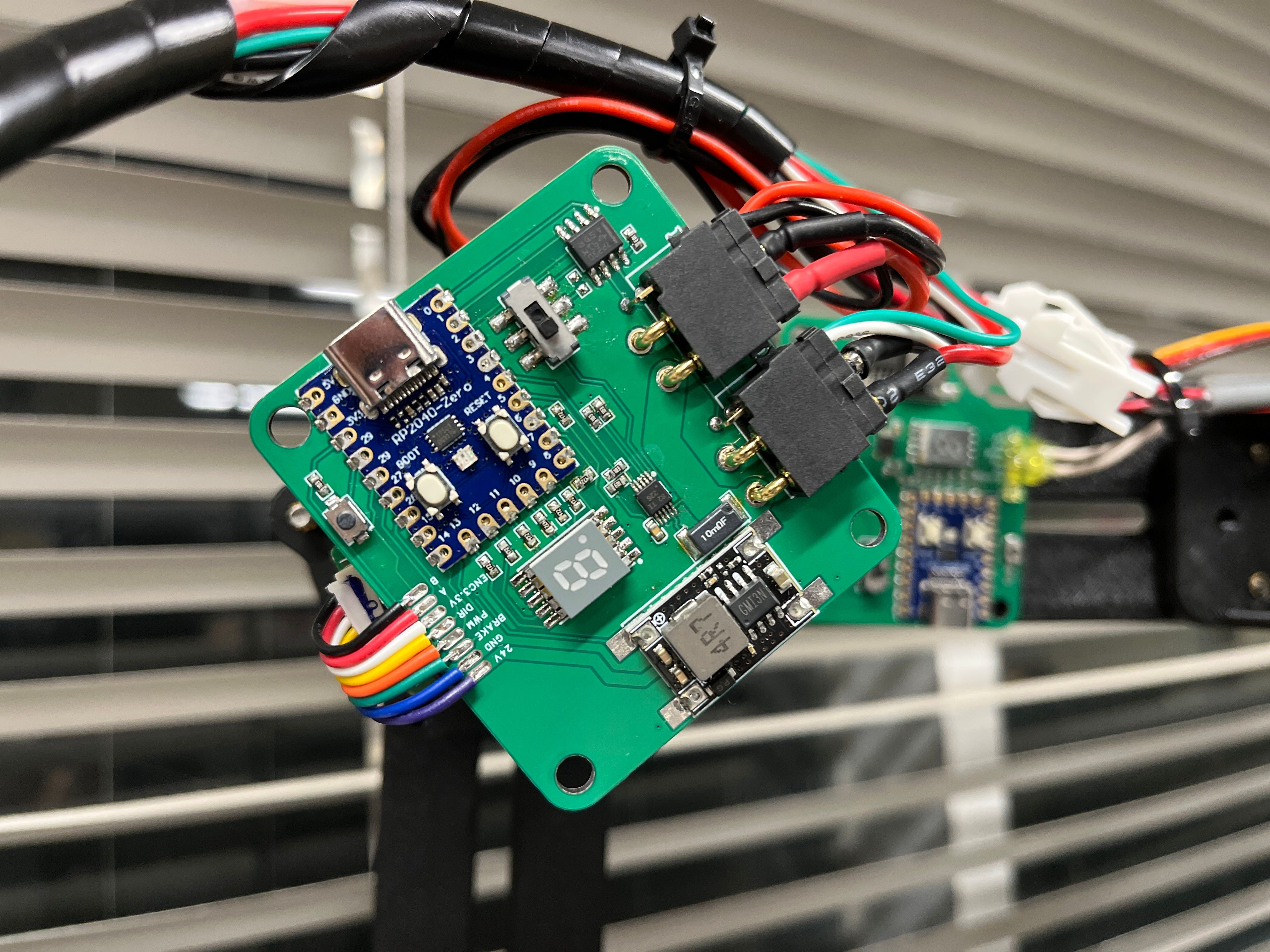
優勝・準優勝の2チームにそれぞれ2個ずつ使われてた。僕はコントローラーの余りが無かったので使わなかったやつ。僕もキャチロボ2025優勝ということで良い?

0→1のファームはRP2350-USB-Aで試しながらArduino IDEで僕が書いて、制御班長にバトンパスしてPico SDK版が完成して、この基板ができた。
部品間違えて買った以外の問題が起きなくて嬉しかった。
キャチロボの部品支給で頂いたミニベアリングのお陰で完成に至った。
サイクロディスク1枚のRV減速機を作った。ヘリカルギア軸から遊星を挟んでサイクロディスクというのはNidec 24Hモーターで一番効率が良い構成だと思ったけど、ベアリング無い摺動だと厳しかったらしい。バックドライブはしなかった。キャチロボには不採用。NT東京に持っていった。
これでも書いた。
1モーター1マイコン1基板にして、PwrCANケーブルで数珠繋ぎにして制御した。
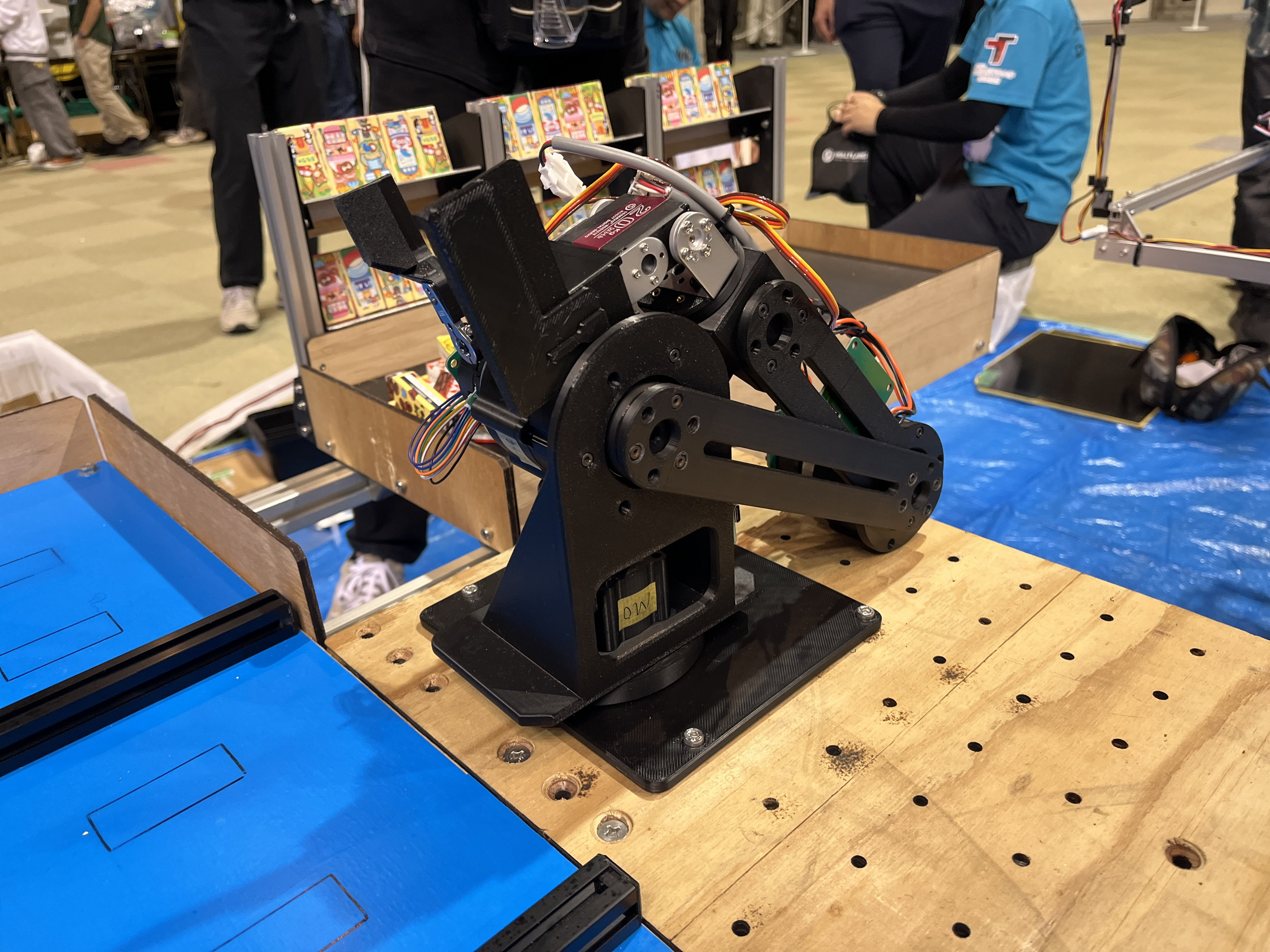
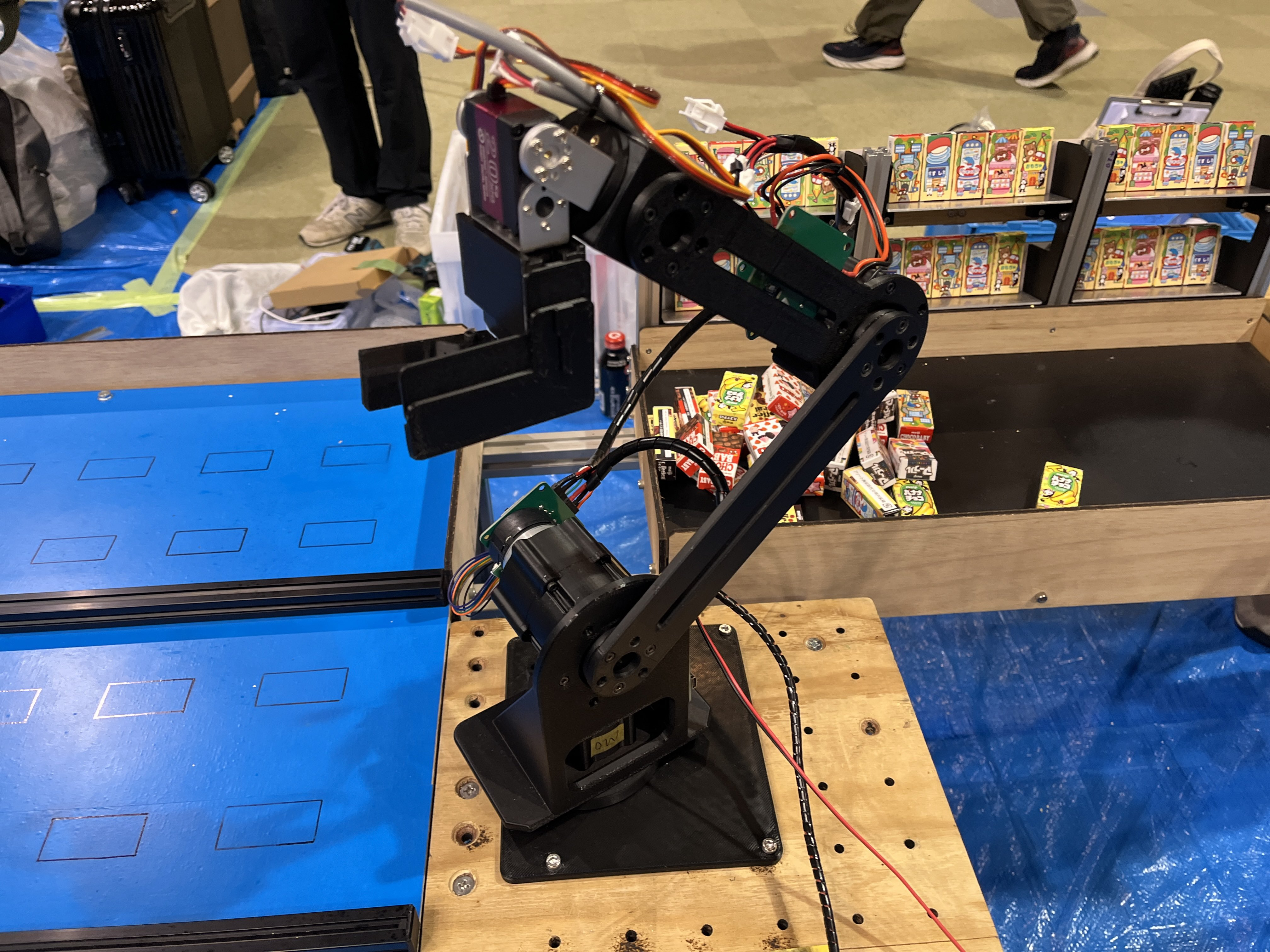
ステップドピニオン型遊星歯車減速機は実質遊星1段だからガタやバックラッシで有利だと思って作ってたけど、トルクを増やしたくて遊星2段して減速比100を達成した。
ギアが脱調するのでアームをゆっくり動かすしかなくなってしまった。
直したい。
参照
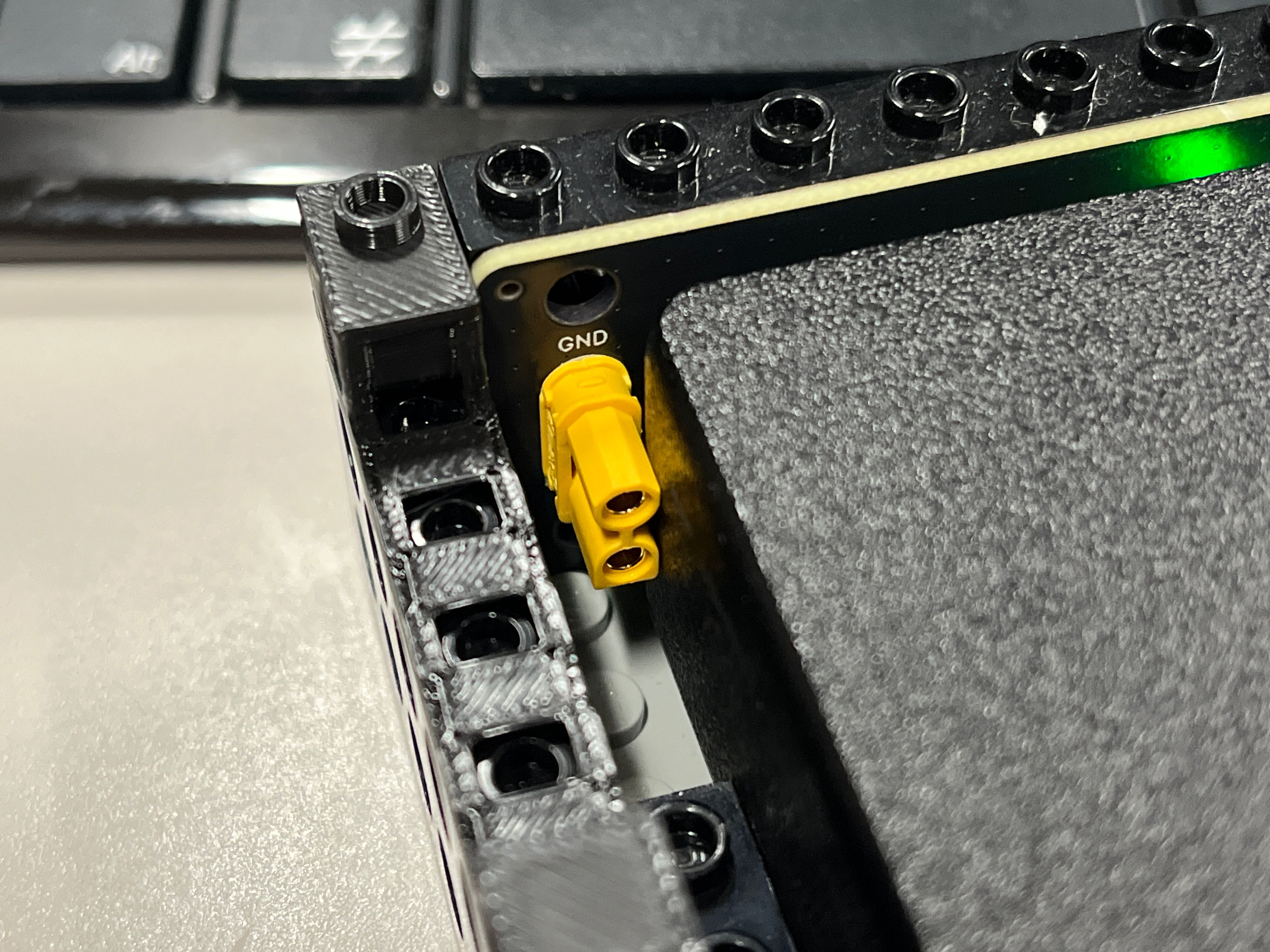
12Vを取り出す。ケーブルちょん切って直接実装。
あとから足せるように作っておいた。

ラジコン化成功。
Arduino R4, ESP32, RP2040/2350からDAMIAOモーターを動かせるやつ。
キャンプ行く日の朝に急に作りたくなって、1時間で作ったら作れた。
後からカードの枚数が違うことに気づいて直した。
C610, C610 v2, C620, C620 v2, GM6020に対応して、CANのIDの重複を検出する機能を付けたライブラリ。Arduino R4, ESP32, RP2040/2350から動かせるやつ。
これもArduino R4, ESP32, RP2040/2350から動かせるやつ。


配線が大変すぎて気が狂うかと思った。
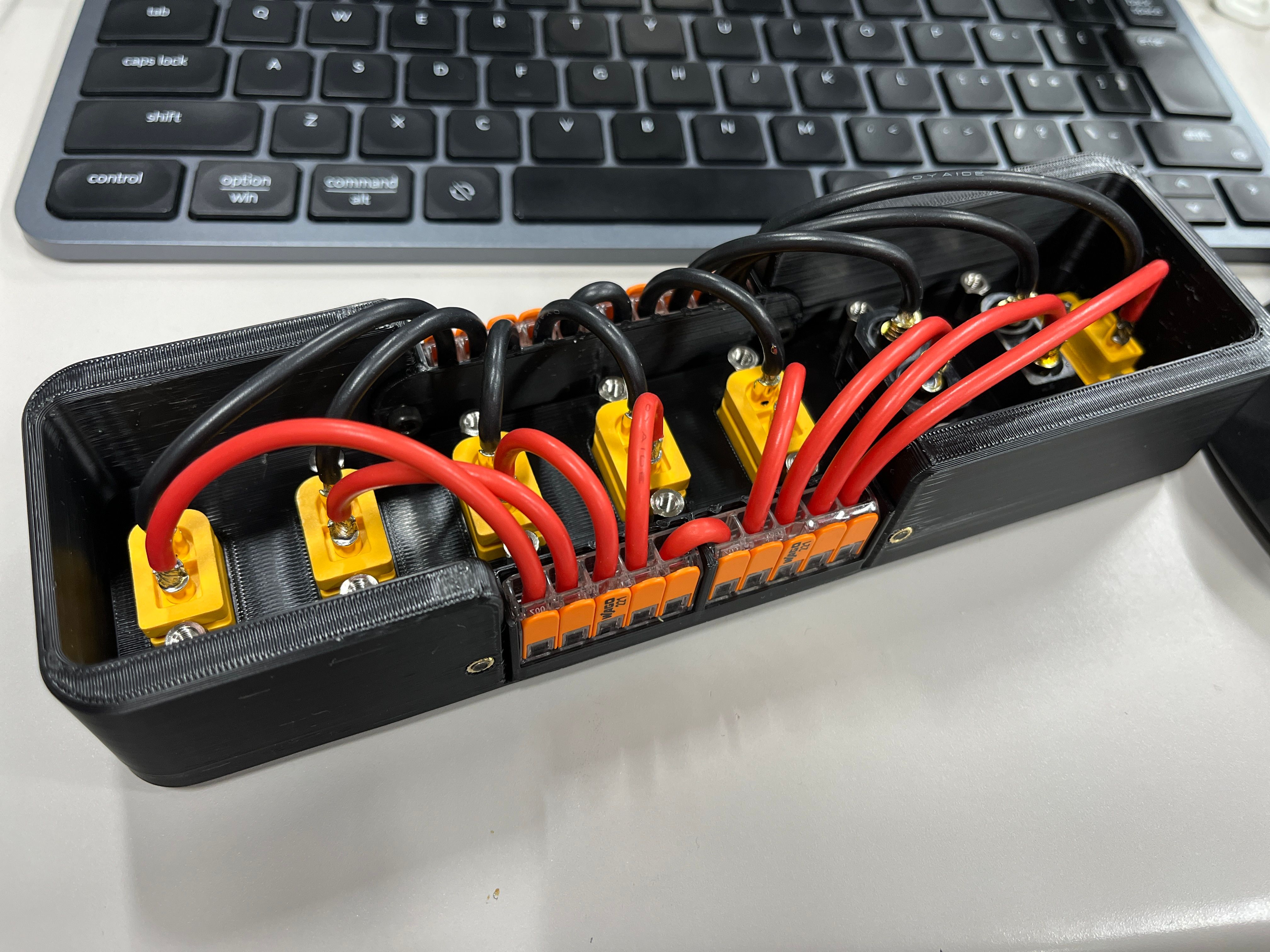

漂う虫っぽさ