

目次
Nidec 24Hモーター
- 激安(655~1400円)
- ブラシレスモーター(KV値250くらい 最高出力30W)
- ドライバ回路内蔵なのでESC不要
- エンコーダ内蔵(A相B相 100ppr)
- DC7~24Vで対応電圧範囲が広い
- PWM, CW/CCW, Brakeの3ピンでマイコンから簡単制御(DCブラシモーターみたい)
ひとことでまとめると、コスパ最強ブラシレスサーボ
NT東京2025に出展していました。

展示内容は、Nidec 24Hモーターと3Dプリントギアヘッドで作ったQDDです。
ご覧いただいた方々に対しては口頭で説明をするばかりで、後にオープンソース化したいとは言ったものの、キャチロボが後に控えていたこともあり着手できていませんでした。↓
キャチロボが終わった後も、なんだかんだで後回しにしてしまっており、ようやく書こうと決心がついたので書きます。
GitHubにまとめられたら良いと思ったのですが、僕はMarkdownと和解できてないので一旦ブログです。
この記事はQDDに使ったモーター部分について詳しく書きます。
Nidec 24Hという名称は、海外の技術コミュニティ、特に倒立振子ロボットやリアクションホイールの製作者の間で言及されるモーター群を指します 。
AliExpressやeBayなどで入手可能な非常に安価なモーターです。655~1400円くらいです。
Nidec(旧 日本電産株式会社)とありますがパチモンではなく、分解されたプリンター(2D)などのOA機器から回収されたモーターを激安で販売しているのだと思っています。
中古だから激安なだけで、モーター自体の品質は高いです。ベアリングはNSKのものが使われています。
モーター外形は42mmで、長寿命、高効率、低ノイズ、低振動のBLDCモーターであり、元はステッピングモーターを置き換えることを目的とした製品のようです。
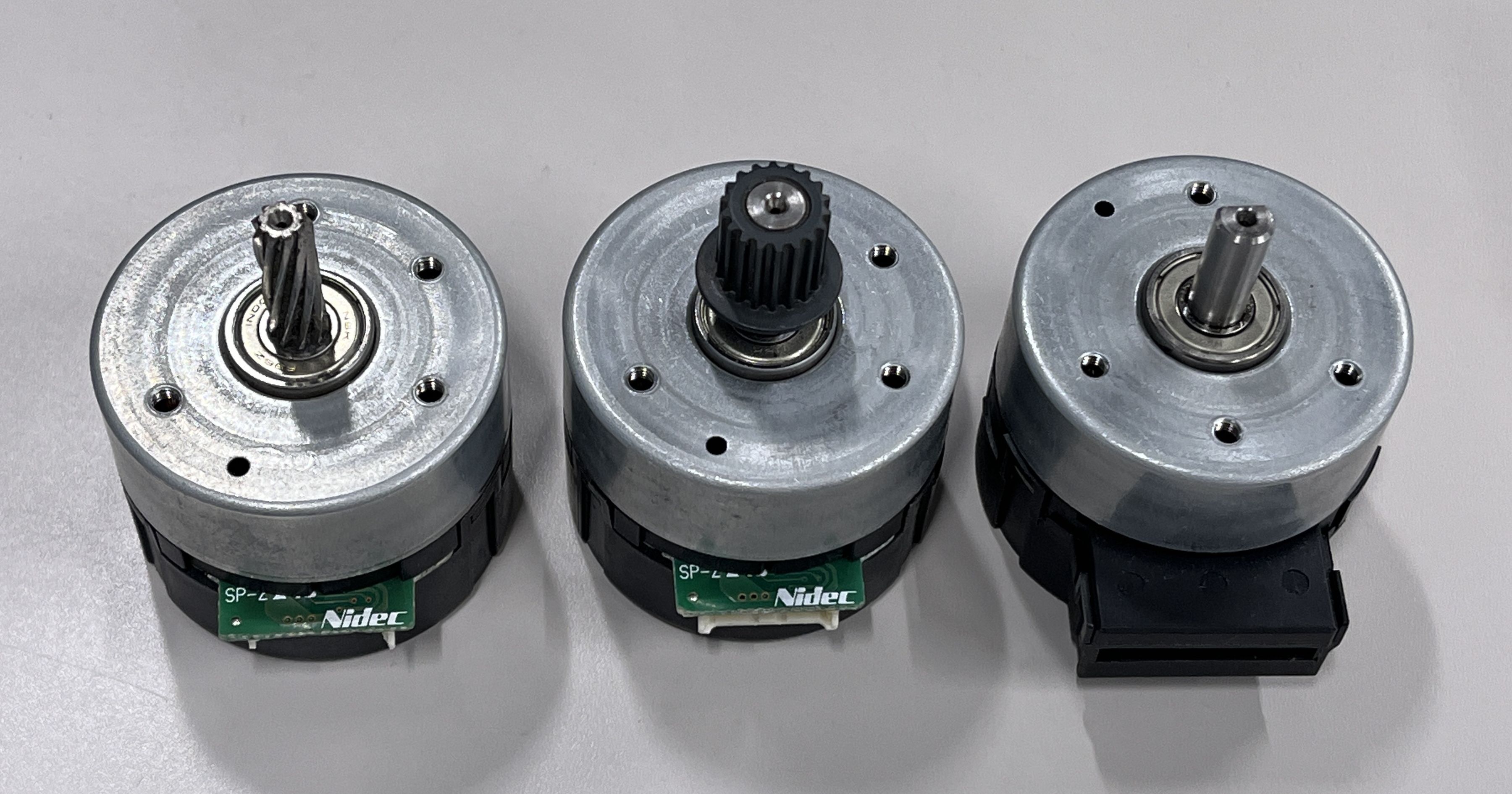
Nidec 24Hモーターには軸の種類・ピン数による仕様違いがあります。


| 型番(軸形状) | 端子 | 電圧 | 制御入力 | 価格 |
|---|---|---|---|---|
| 24H404H070 (ヘリカルギア軸) | ZH 8P | 7~24V | PWM(負論理) 20kHz~30kHz | 655~1200円 |
| 24H404H160 (プーリー軸) | ZH 8P | 7~24V | PWM(負論理) 20kHz~30kHz | 1400円 |
| 24H055M020 (Dカット軸) | ZH 12P | 12V | PFM(1000Hzにつき150rpm) | 900~1200円 |
Dカット軸のものは速度制御がデフォルトで組み込まれており、やたら発振して使いものにならないほか、エンコーダ出力がピンに出てないなどの問題があるのでおすすめしません。
上記ページにて、Dカット軸はヘリカルorプーリーの回路にマイコンが足されてPFMによる速度制御が追加実装されていて、そのマイコンを剥ぐと同じになるので負論理のPWMで動くようになると書いてあります。頑張れば使えそうです。
ヘリカルギア軸とプーリー軸は中身が一緒です。以降書いていくのは全てヘリカルギア軸とプーリー軸についてです。

ヘリカルギア軸のZHコネクタのベース部分が割れていますが、これは僕が破壊しただけなので気にしないでください。
中身が同じにも関わらず、ヘリカルギア軸の方がプーリー軸のものより安いのは、ヘリカルギア軸が使いにくいからだと推測しています。
ヘリカルギア軸のモーターを救いたいと思って作ったのが遊星歯車減速機によるQDDです。
軸形状は、モジュール0.5 歯数9 ねじれ角12° です。これで散々遊星歯車減速機を作ってるので合ってるはずです。
ヘリカルギア軸のものより高価(2倍以上)なのでまだ工作に使ってません。
プーリー形状は多分下の通りです。3Dプリンターで印刷して嵌ることを確かめました。
モジュール0.6 歯数18
この歯車を直径11.2mmの円でカット
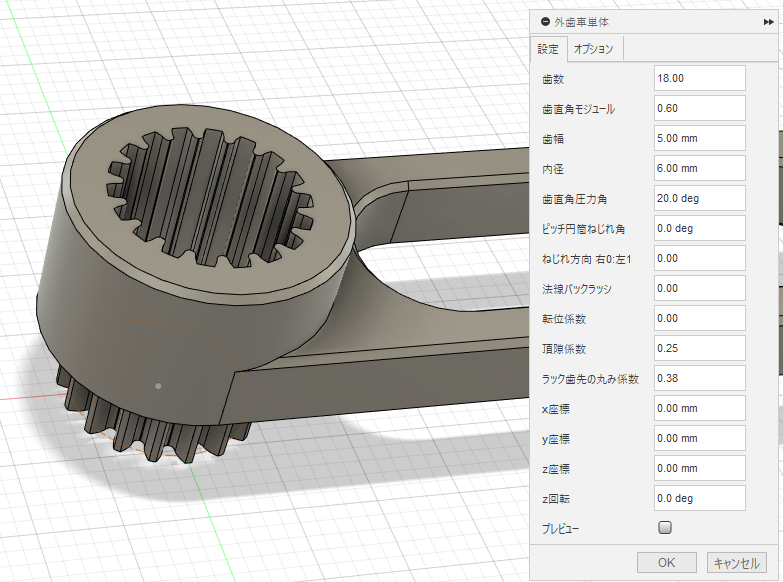
2GTのタイミングベルトを直接噛み合わせる事例を見かけました。歯車というよりは2GTのプーリーとして設計されたものと認識したほうが正しいのかもしれません。2mmピッチのMXLのベルトも同じですかね?
- 激安(655~1400円)
- ブラシレスモーター(KV値250くらい 最高出力30W)
- ドライバ回路内蔵なのでESC不要
- エンコーダ内蔵(A相B相 100ppr)
- DC7~24Vで対応電圧範囲が広い
- PWM, CW/CCW, Brakeの3ピンでマイコンから簡単制御(DCブラシモーターみたい)
コスパ最強です。
ブラシレスモーターとしても安いのですが、単純にインクリメンタルエンコーダとして使うだけでも安いんじゃないかと思っています。
- Dカット軸のモーターは完全に別物
- ピンの説明を読むときにケーブルの色を信用してはいけない
- PWMは負論理なので0%で最高出力
- ストール検知機能は位置制御の邪魔になるのでBRAKEピンで殺すとよい
型番で調べても絞りきれません。CMC_24HシリーズとしてNidecの製品情報ページに記載がありますが、似ているけど仕様が異なるものが4個ありました。
形状は完全にNCJ-24H-12-02なんですが、これは12Vモデルです。NCJ-24H-24-01とNCJ-24H-24-02の見た目とスペックが同じせいで変です。NCJ-24H-12-01とNCJ-24H-12-02の法則から考えると、NCJ-24H-24-02の商品写真が間違っている気がします。そして、Nidec 24Hモーターとして今回取り上げているのはNCJ-24H-24-02だと思います。
怪しいところに割と細かく書かれたPDFがありました。

エンコーダ電源が無いときのオープンドレインのタコメータの機能は、試しても使えずよく分かりませんでした。
Nidecの類似の製品のデータシート等から総合的に判断して、3相12極9スロットでホールセンサ3つのセンサードブラシレスモーターだと思います。
下記は実測です。
| 電圧 | ストール電流 | 無負荷時電流 | 無負荷時回転数 | 最大トルク |
|---|---|---|---|---|
| 9V | 2.3A | 0.06A | 2270rpm | 未測定 |
| 12V | 2.5A | 0.064A | 3037rpm | 未測定 |
| 24V | 1.25A | 0.075A | 6120rpm | 0.106 N·m |
ストール電流はざっと12V以下では電圧の一次関数っぽくて、12V以上ではストール時の電力が一定っぽいです。しっかり測ってません。
KV値は250くらいだと思います。
コギングトルクはほとんど感じません。コリコリ感はゼロで、グリス多めのベアリングみたいな粘性抵抗っぽいものです。キッチンスケールでは測れませんでした。
コギングトルクがほぼ無いので、バックドライブトルクもほぼありません。減速比10や20では指で簡単にバックドライブします。
商品ページを探し回って分解した基板の裏側の画像を見つけました。


論理が反対でデューティが0に近いほど出力が上がるタイプのPWM制御です。20kHz~30kHzと商品説明にあったのでそれで使っています。
よくあるESCのようなPWMのパルス幅で回転速度を制御するのではなく、単純にデューティ比に反比例してそうな感触です。基板に電流を読む機能はなさそうなので電圧制御(ブラシレスで?)なんですかね。
デューティ0%(GNDと短絡時)が最高出力になるので、アナログ電圧で動くのか可変抵抗で試してみましたが、それは動きませんでした。(0V時のみ最高速で回転して、少しでも電圧を上げると止まった)
ストール保護機能が付いています。光学式エンコーダを読んでいるのかホール信号から判断しているのかまでは調べてませんが、デューティが100%でない(制御入力がある)ときに軸が動かないまま1秒くらい経つと、モーター出力が停止します。この場合、デューティーを100%に戻すか、BRAKEピン(START/STOPピン)をON(LOW)にして戻すと通電が再開します。
僕は軸の速度がほぼ0の状態が100ms続いた場合、BRAKEを1μs ON(BrakeピンをLOW)にするような処理をマイコンで実装しています。
位置制御を使うときは、この機能を入れないと使い物にならないので注意です。
リアクションホイールでばかり使われるのはこの機能が邪魔だからなのかもしれません。
ALLEGRO 6641ETがゲートドライバ です。しかし、調べても全然情報が出てこないので、カスタム品なのだと思います。
パッケージや仕様から推測して、ALLEGROのA4931かA4938のどちらかだと考えています。
回路図を模写すれば分かりそうです。
MOSFETはROHMのSP8K5です。
制御電源(ロジック・エンコーダ電源)の有無で動作が少し変わります。
制御電源なし
- brakeが常時作動する。
- brakeピンをHighにすると最大出力で回転する。
制御電源あり
- brakeピンはプルアップされている。
- brakeは常時作動していない。
- brakeピンをLowにするとブレーキが作動する。
コネクタはJST S8B-ZR-SM4Aです。ZHR-8が適合します。
これは後ろ側から見た図です。右が1番ピンです。一番左が8番ピンです。
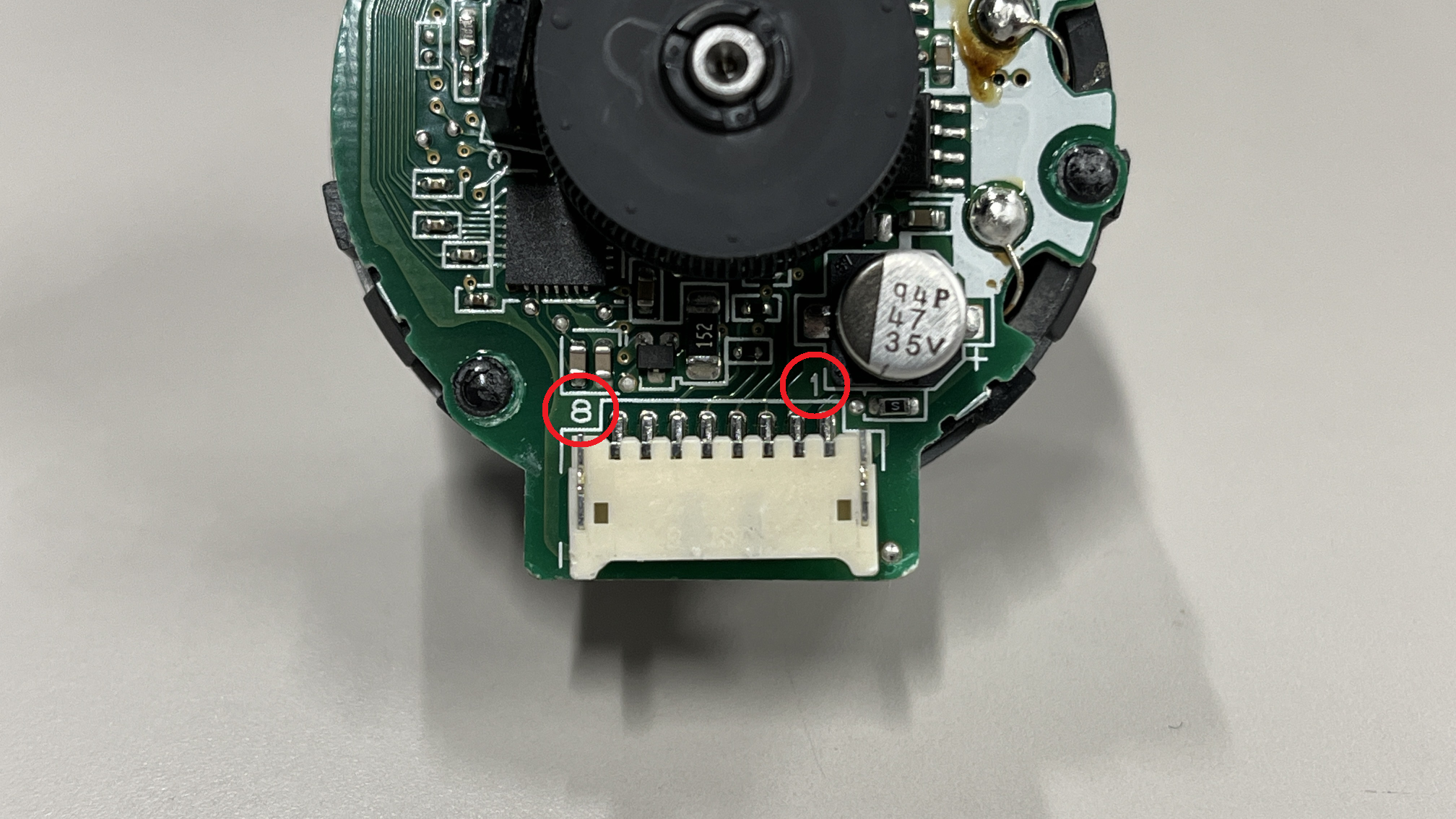
様々な商品画像でピンの説明があると思いますが、ケーブルの色ではなくピン番号を見てください。僕が購入したモーター付属のZHケーブルは全て色の順番が滅茶苦茶なものでした。痛い目を見ることになります。
| No. | 機能 | 説明 |
|---|---|---|
| 1 | VCC | 7~24V |
| 2 | GND | 駆動・ロジック共通 |
| 3 | BRAKE | HIGH or OPEN Brake OFF / LOW : Brake ON |
| 4 | PWM | 20kHz~30kHz, Duty 0%で出力MAX, Duly 100%で出力0(停止) |
| 5 | CW/CCW | HIGH or OPEN : CW / LOW : CCW |
| 6 | ENC PWR | ロジック電源(エンコーダ電源) 5V23mA/3.3V12mA |
| 7 | CH B | エンコーダのB相 |
| 8 | CH A | エンコーダのA相 |
PWMサーボが使われるような高トルク用途には向きません。およそ1kg·cmです。
一番向いているのはやはりリアクションホイールです。
回転体に摩擦がほぼ無いので、入力を与えているのに軸が回らないことがなく、ストール保護機能が働かないので機能を殺す方法を考える必要がありません。
これに対して、位置制御で重たいものを動かす、姿勢を維持するなどの使い方や、ロボットの足回りに搭載して、静止状態から動かすなどの場合に、ストール保護機能が働くので殺してやる必要があります。また、トルクが足りないのですぐ熱くなります。
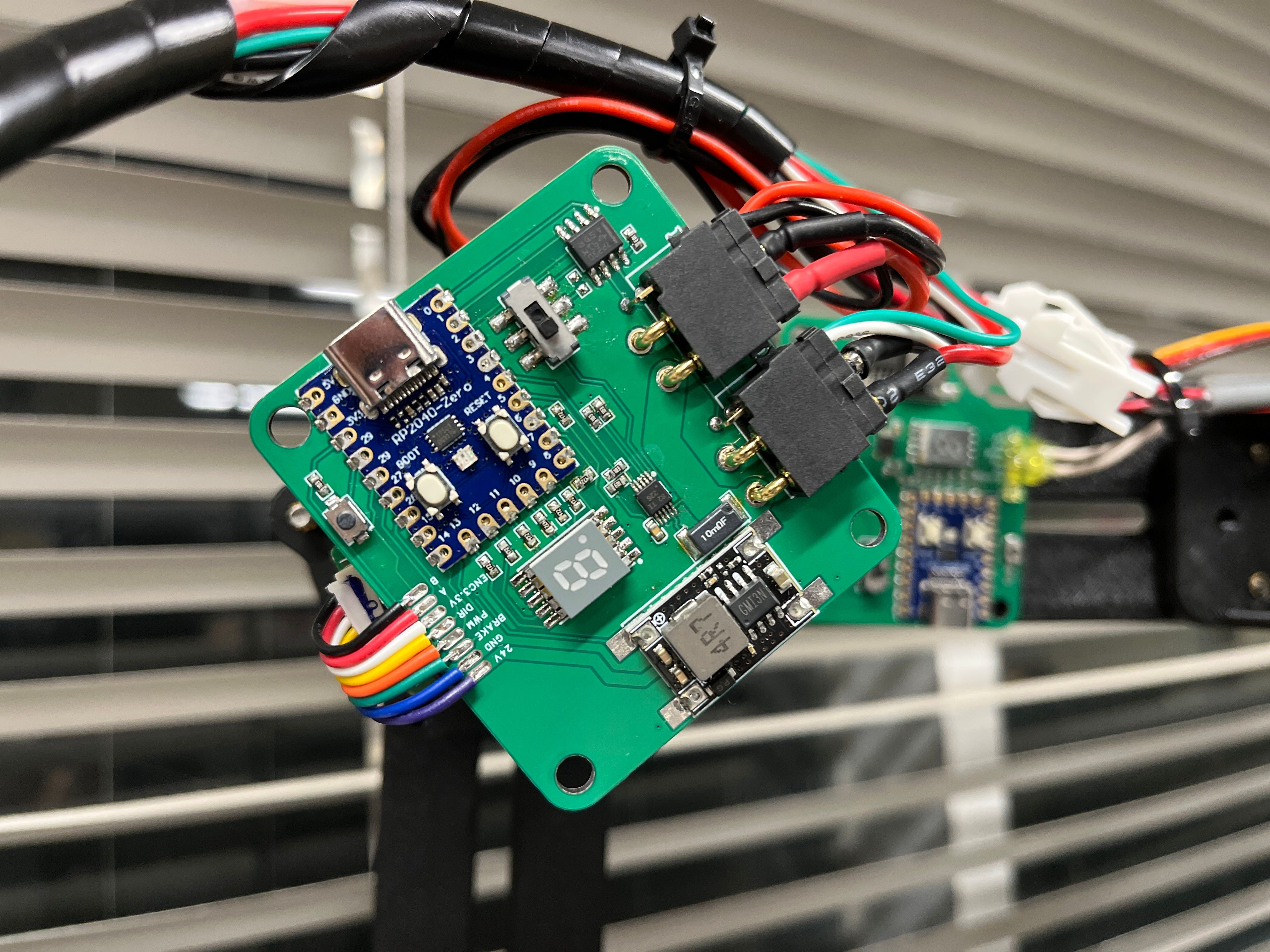
キャチロボの際に作った基板です。モータードライバに見えますがそんなことはなく(内蔵されているので)、1モーター1マイコン(RP2040-Zero)でCAN経由で制御するためのものです。PwrCANケーブルで数珠繋ぎにしてイマドキのQDDっぽく使ってみたものになります。
ピッタリすぎるアルミの放熱フィンが売ってます。

Creality K1 K1max K1C等のエクストルーダーモーター用のヒートシンクらしいです。本来は外径36mmのモーターに装着するもののようですが、エイッと押し込めば入ります。Nidec 24Hモーターは外径42mmなのもあって2個がピッタリ嵌ります。放熱したい場合におすすめです。
直径を無理やり押し広げているので時間経過で「キンッ」という小気味いい音と共に飛んでいきます。外周をテープで巻くか、結束バンドで留めるなどの工夫は必要です。
10個まとめ買いで130円/個くらいになります。
まだ書きたいけど書けていないことが色々あります。公開を優先します。

減速比10のQDD化用ギアヘッドのデータを置いておきます。BambuLab A1 miniでPLA+でそのまま印刷すれば同じになるはずです。
↑ピニオンギア用のワッシャーを含んでませんでした。6つ要ります。
インサートナットがM3用 長さ3mm 基準外径4.0mm 最大外径4.2mmのものを6つ以上(遊星キャリアに3個、ケースの蓋の固定用に3個以上)
M3の六角穴付きボルト 30mmが6本以上(遊星キャリアに3本、ケースの蓋の固定用に3本以上)
M3の皿ネジ(8mm以下がいい)3本(ギアヘッドのモーターへの固定用)
6907ベアリング1個(内径35mm, 外径55mm, 厚さ10mm)か、下記BB弾ベアリング1個